Sensor Ultrassônico Analógico HC-SR04
/*
---------- Sensor Ultrassônico HC-SR04 ----------
Código para poder usar o sensor ultrassônico HC-SR04 na porta analógica, medindo de 0cm até 50cm com "precisão"
Versão do Software: 1.0 //não apague essa linha, para futuras consultas
Software open source, favor citar o autor: Seu Robô https://SeuRobo.com.br/
*/
//Definindo os pinos
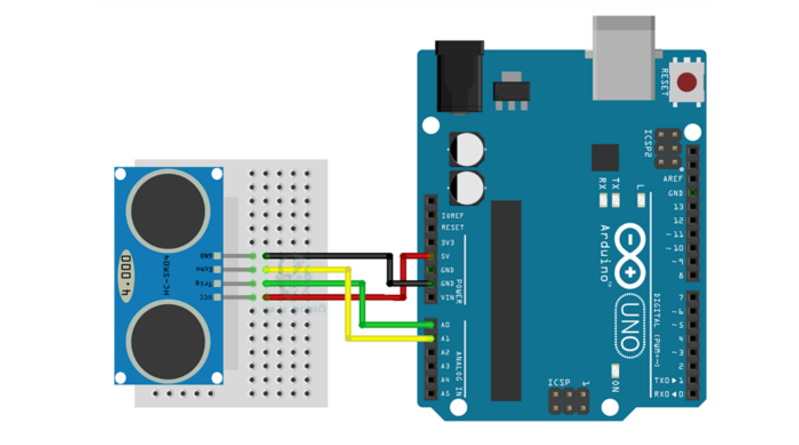
#define echoPin A1 //Pino ECHO do sensor no pino analógica A1
#define trigPin A0 //Pino TRIG do sensor no pino analógica A0
//variáveis para o sensor ultrassonico
long duracao;
long HR_dist = 0;
int minimumRange = 5; //tempo de resposta do sensor
int maximumRange = 200;
// executado na inicialização do Arduino
void setup() {
Serial.begin(9600); // inicializa a comunicação serial para mostrar dados
pinMode(trigPin, OUTPUT); //define o pino TRIG como saída
pinMode(echoPin, INPUT); //define o pino ECHO como entrada
}
void loop() {
Distancia(); //chama a função para medir a distância
//Seu Robô http://SeuRobo.com.br/
}
// Função para calcular a distância do objeto
void Distancia() {
digitalWrite(trigPin, LOW); //não envia som (limpeza de ruídos)
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); //envia som
delayMicroseconds(10);
digitalWrite(trigPin, LOW); //não envia o som e espera o retorno do som enviado
duracao = pulseIn(echoPin, HIGH); //Captura a duração em tempo do retorno do som.
HR_dist = duracao / 56; //Calcula a distância
Serial.println(HR_dist); //Exibe na Serial a distância
}
//Fim
//Versão do Software: 1.0 //não apague essa linha, para futuras consultas